首都高速道路株式会社(本社:東京都千代田区、代表取締役社長:寺山 徹)、首都高技術株式会社(本社:東京都港区、代表取締役社長:加古 聡一郎)、株式会社JDRONE(本社:東京都新宿区、代表取締役社長:大橋 卓也)、KDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)、NTTドコモビジネス株式会社(本社:東京都千代田区、代表取締役社長:小島 克重)は、狭小(閉鎖空間)で電波環境が悪く通信機器の使用が制限された空間でのドローンを活用した構造物点検及び災害時の被害状況把握を目的として、首都高速道路八重洲線のトンネル換気ダクト内を対象に2月9日(月)、2月12日(木)に実証実験を実施しました。
本実証では、狭小(閉鎖)空間において飛行可能である様々なドローンを用いて、機体特性の把握と構造物の健全性確認や遠隔地からの状況把握が可能であることを確認しました。
トンネル換気ダクト内に代表される狭小空間は、「非GNSS(GPSが届かない)」「暗所」「電波不感地帯」という過酷な環境にあり、従来のドローンでは安定した飛行やリアルタイムな情報共有が困難でした。本実証では、こうした悪条件下において、最新の通信技術と機体に応じた飛行運用技術を組み合わせることにより、構造物の健全性確認や災害時の迅速な被害状況把握にドローンが適用可能かを検証しました。
実証実験当日の様子(ダイジェスト動画)はこちらをご覧ください。
本実証の概要及び各社の実証実験の詳細は下記をご参照ください。
【添付資料】
実証実験の概要
【別紙1】実証実験の詳細(株式会社JDRONE)
【別紙2】実証実験の詳細(KDDIスマートドローン株式会社)
【別紙3】実証実験の詳細(NTTドコモビジネス株式会社)
お問い合わせ先
・本件全体に関するお問い合わせ
首都高速道路株式会社
広報課
03-3539-9257
・ドローンを活用した点検に関するお問い合わせ
首都高技術株式会社
技術営業課
03-3578-5757
本件に関する報道機関からのお問い合わせ先
・ドローンに関するお問い合わせ
株式会社JDRONE
営業部
03-4236-0080
KDDIスマートドローン株式会社
事業企画部
smartdrone-marketing@kddi.com
本件に関するお客さまからのお問い合わせ先
・ドローンに関するお問い合わせ
株式会社JDRONE
contact@jdrone.tokyo
KDDIスマートドローン株式会社
事業企画部
smartdrone-marketing@kddi.com
NTTドコモビジネス株式会社
プラットフォームサービス本部
5G&IoTサービス部
ドローンサービス部門
■実証実験の概要
日時:2026年2月9日(月)、12日(木)
場所:首都高速八重洲トンネルダクト内
概要:[1] 対象環境に進入不可状況を想定したマンホール上からの遠隔点検(株式会社JDRONE)
[2] 機能および運用面を考慮した小型ドローンでの換気ダクト内の点検比較検証(KDDIスマートドローン株式会社)
[3] 換気ダクト内にネットワーク環境を構築し、自律飛行ドローンを用いた遠隔地※からの点検操作及びドローン映像とガスセンサーのセンシングデータを同一プラットフォーム
(intdash)にて一元管理(NTTドコモビジネス株式会社)
※NTTドコモビジネス社の会議室
■本実証における役割
| 会社名 |
役割 |
使用機体名 |
| 首都高速道路株式会社 |
全体総括 |
|
| 首都高技術株式会社 |
安全管理 |
|
| 株式会社JDRONE |
実証実施者 |
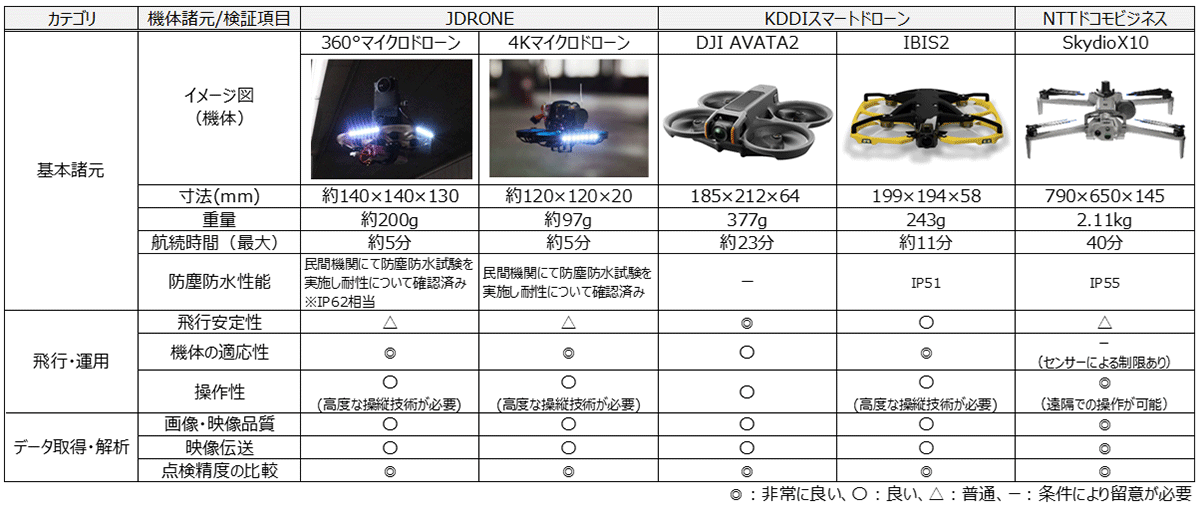
360°・4Kマイクロドローン |
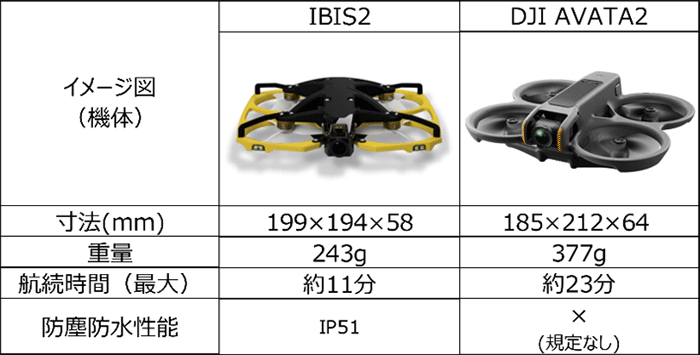
| KDDIスマートドローン株式会社 |
実証実施者 |
IBIS2・DJI AVATA2 |
| NTTドコモビジネス株式会社 |
実証実施者 |
SkydioX10 |
■検証項目と結果
本実証の結果、狭小空間における機体選定や点検手法及び遠隔地からの点検に向けて有益な検証結果を得ることができました。一方で、狭小空間内の粉塵による機体への影響や通信環境の構築、機体選定と機体特性に応じた、操縦の熟練度が必要であることなど、今後の運用に向けた課題を確認しました。
本実証結果を踏まえ、迅速かつ確実に点検を行うために多様な点検手法の確立と体制構築に引き続き取組んでまいります。
【別紙1】実証実験の詳細(株式会社JDRONE)
■実証実験の概要
実施者:株式会社JDRONE
日時:2026年2月9日(月)13時~17時
場所:首都高速八重洲線トンネルダクト内
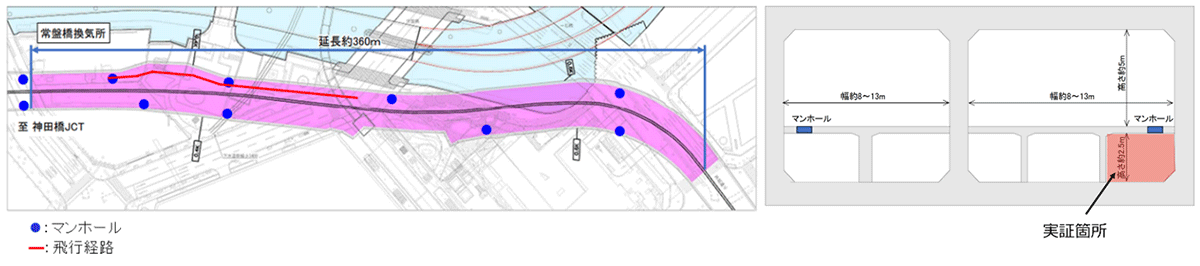
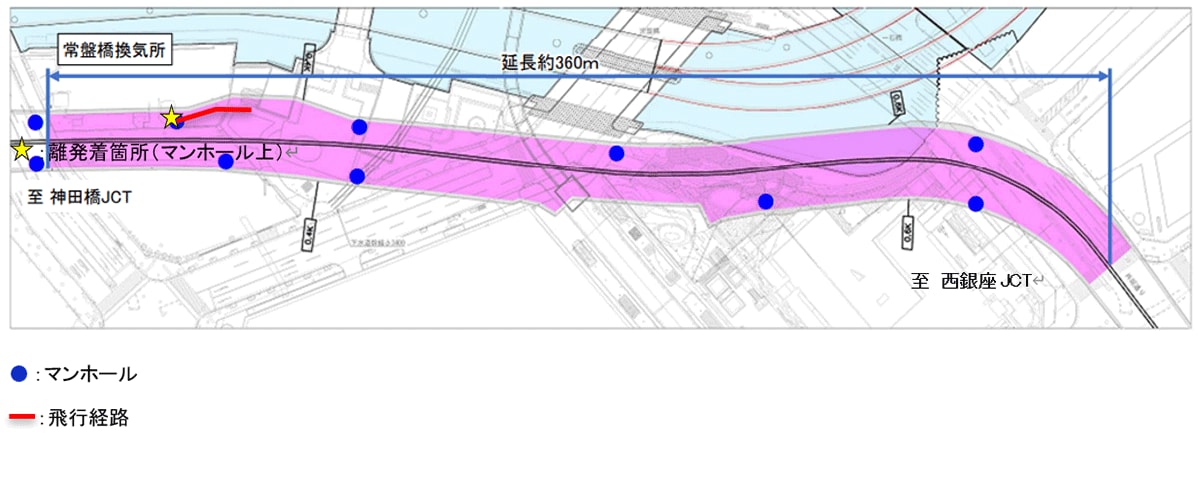
概要:対象箇所への進入ができない場合を想定し、マンホール上から延長アンテナを用いて換気ダクト内に通信環境を構築することで通信を確保し、マンホール上部から遠隔操作にて飛行延長の確認や構造物の詳細点検を実施
目的:災害時や特殊な環境下で点検対象箇所へ直接進入することが困難なケースを想定し、マンホール等の開口部から安全かつ速やかに点検手法を確立すること
■使用機体
イメージ図
(機体) |
360°カメラマイクロドローン |
4Kカメラマイクロドローン |
|
|
| 寸法(mm) |
約L140mm×W140mm×H130mm |
約120mm×120mm×H20mm |
| 重量(g) |
約200g |
約97g |
| 最大航続時間(分) |
最大約5分間 |
最大約5分間 |
| 伝送距離(m) |
約100m以上(対象環境による) |
約100m以上(対象環境による) |
| 防塵防水性能 |
民間機関にて防塵防水試験を実施し
耐性について確認済み※IP62相当 |
民間機関にて防塵防水試験を実施し
耐性について確認済み |
■飛行経路(約100m)
■検証項目と結果
| 検証項目 |
検証結果 |
| ドローンの有効性 |
- マンホール外からの離発着および操縦が可能で、作業員が内部へ立入ることなくダクト全体の確認を実施できた。
- ドローンによる先行確認が可能になったことで、危険が想定される空間へのアクセスにおける点検作業の安全性が向上した。
- 360°カメラの活用により、点検時間を大幅に短縮し、効率的な点検が可能となった。
|
| 飛行安定性 |
- マンホールの穴(直径 約60cm)も問題なく通過し、壁面接触や制御不能な状態は発生しなかった。
- 一方で、人が操作するため飛行の安定が一定になりにくい点は課題として挙げられる。
|
| 操作性・環境 |
- 機体の組立てを必要とせず立ち上げが速い。
- マンホール外からカメラ映像を見ながらの操縦でも、問題なく操作ができた。
- GPSが使用できない環境下でも飛行に支障はなく、地下点検の活用シーンに対応できた。
- 操作には操縦者の技量が求められる。
|
| 長距離飛行性 |
- ダクト内部を一連のルートで問題なく飛行し、想定距離(片道 約100m)の点検を完了できた。
- 映像伝送も途切れにくく、マンホール外との通信が安定して維持されたため、長距離点検への実用性が確認できた。
|
| 画像・映像品質 |
- 全体から詳細部分までの確認が可能であった。
- 4K映像の取得が可能で、ボルト・接続部などの詳細箇所の確認にも対応できた。
- 一方で、操縦者の技量に影響され、映像がぶれやすいという課題がある。
|
| 点検の精度 |
- 点検記録として映像データを保存でき、再確認・比較にも活用可能。
|
上記の検証結果より、災害時や特殊な環境下で作業員が内部に進入できない場合でも、マンホール開口部などの狭所から安全かつ迅速に点検できる手法として、マイクロドローンが有効であることが確認できた。
短時間で運用を開始できる点や、作業員が立入らずに点検できる点は、初動対応の迅速化や点検業務の省力化、安全性向上に効果的である。
災害対応力の強化と安全性・効率性の向上につながる点検モデル確立に向けた重要な知見を得られた。
一方で、操縦技量への依存や映像の安定性など、運用面や技術面での課題も明らかになった。
■実証実験の様子

※本作業は、事前の安全確認および管理体制のもと実施しています。
【別紙2】実証実験の詳細(KDDIスマートドローン株式会社)
■実証実験の概要
実施者:KDDIスマートドローン株式会社
日時:2026年2月9日(月)10時~13時
場所:首都高速八重洲線トンネルダクト内
概要:機能および運用面を考慮した小型ドローンでの換気ダクト内のスクリーニング点検比較検証
目的:実運用に耐えうる点検品質を確保できるか把握すること。
■使用機体
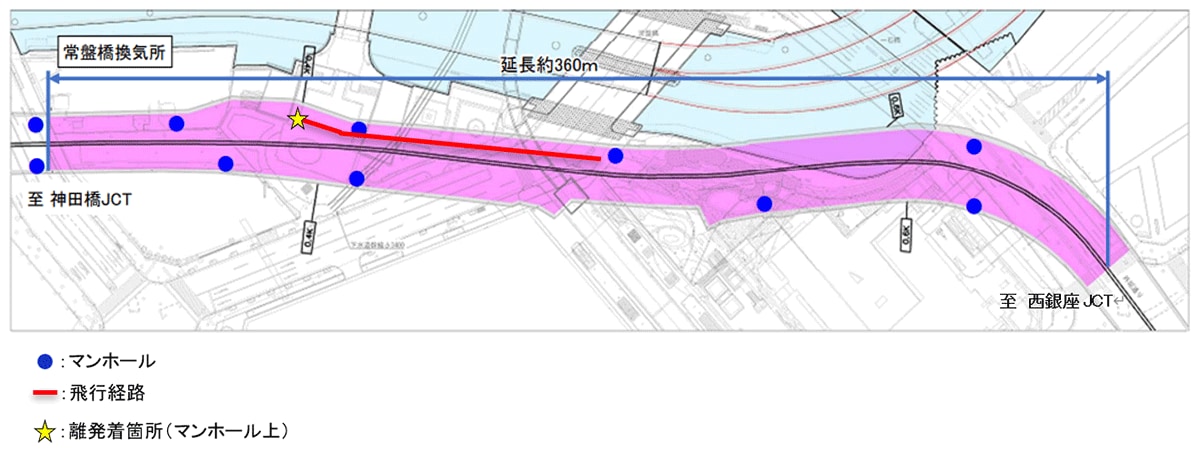
■飛行経路(約160m)
■検証項目と結果
| 検証項目 |
検証結果 |
| 飛行安定性 |
IBIS2およびAVATA2ともに飛行安定性は保たれていた。
また、照明間の暗部においても、飛行中にぶれることなく、ともに安定した飛行が可能であった。 |
| 操作性・環境 |
IBIS2は上下左右の細やかな微調整が行えるため、
飛行性能を最大限に活かすには一定の習熟度が求められるが、狭小空間内でも思い通りに機体を動かすことが可能であった。
また、防塵性能が高い機体となっており、粉塵が舞いやすいダクト内でも安定して運用が可能であった。
一方で、AVATA2はIBIS2ほど細かな操作を意識せずとも安定して飛行するため、比較的容易に操縦が可能であった。 |
| 長距離飛行性 |
通信可能距離については、IBIS2が124.3m、AVATA2が161.9mであり両機体ともに、安定した通信距離を確保できており、今回のダクト内点検における必要な範囲を十分にカバーできる性能を確認した。 |
| 画像・映像品質 |
撮影した映像は目視点検の代替として適用可能な映像が取得可能であった。
また、リアルタイムの映像においても、大きな乱れ等もなく、主要な変状が手元の画面上でも確認可能であった。 |
| 点検の精度 |
トンネル内における代表的な損傷(はく落、漏水、鋼材腐食、ボルトの状況など)はドローンの映像上でも確認可能であり、目視点検の代替として十分耐えうるものであった。
ひび割れについても、50cmの離隔で0.25mmのひび割れまで検出可能であった。 |
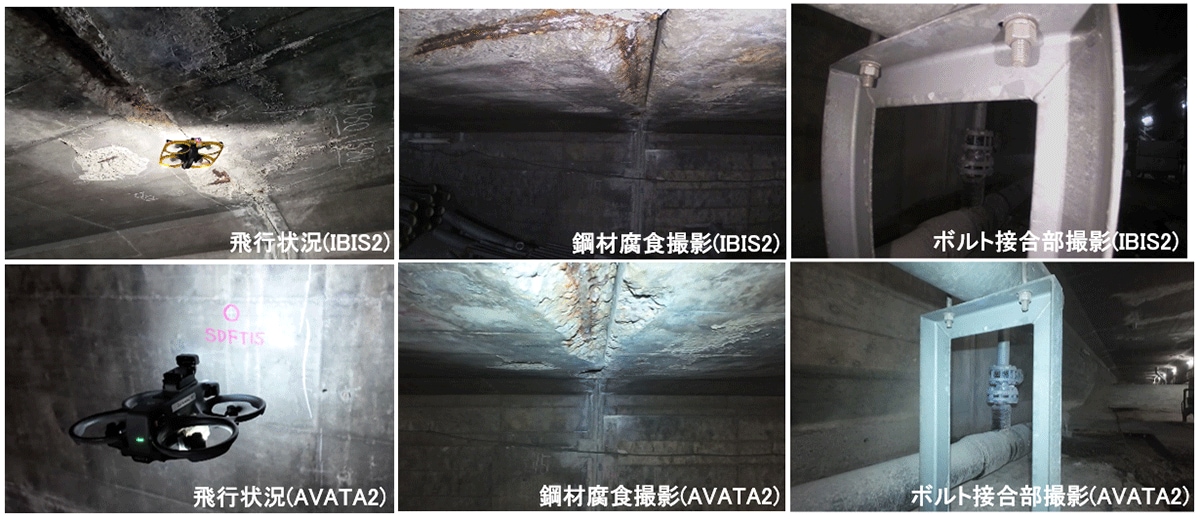
■実証実験の様子
【別紙3】実証実験の詳細(NTTドコモビジネス株式会社)
■実証実験の概要
実施者:NTTドコモビジネス株式会社
日時:2026年2月12日(木)10時~17時
場所:首都高速八重洲線トンネルダクト内
概要:本実証では、電波不感地帯・非GPS空間・暗所・狭小といった点検困難な地下施設を対象に、自律飛行型ドローン活用を主題として検証を実施しました。具体的には、緊急時に高技能パイロットを現地に配置できない状況を想定し、遠隔地※1からのドローン操縦の実効性検証、電波不感地帯におけるドローン操縦のためのネットワーク環境の構築、あわせて平時における構造物点検の経過観察や、発災後のドローン撮影画像との差分確認を目的としたデジタルツイン構築による検証を実施しました。
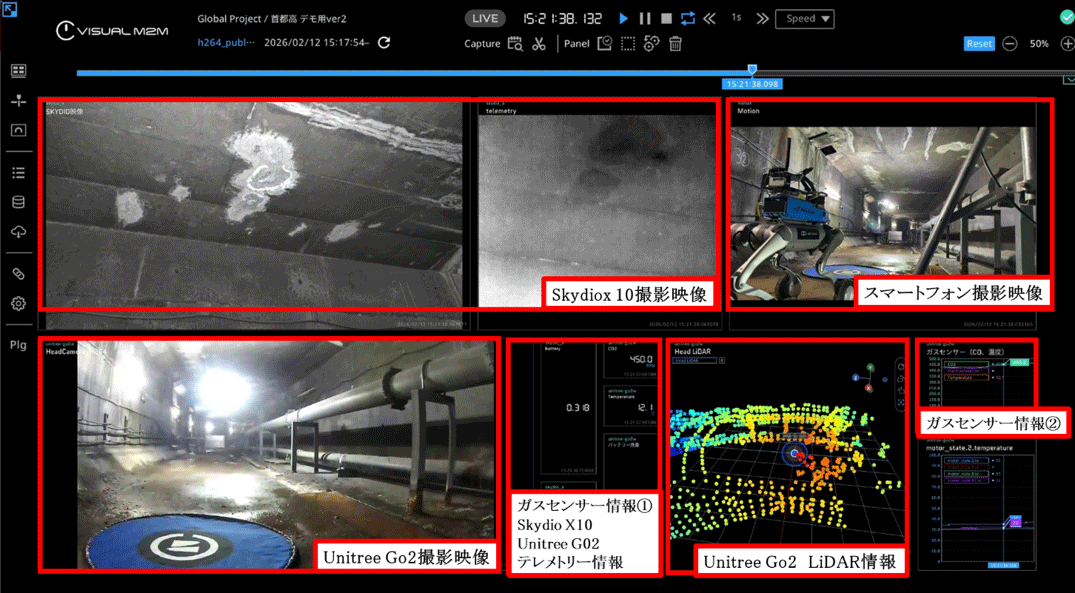
さらに、今回ドローンとIoTプラットフォームのAPI連携による情報収集に加え、四足歩行ロボット、スマートフォン、ガスセンサーなどを活用した情報収集を行い、多角的な情報収集をIoTプラットフォーム上で一元管理する総合的な点検モデルの検証を実施しました。
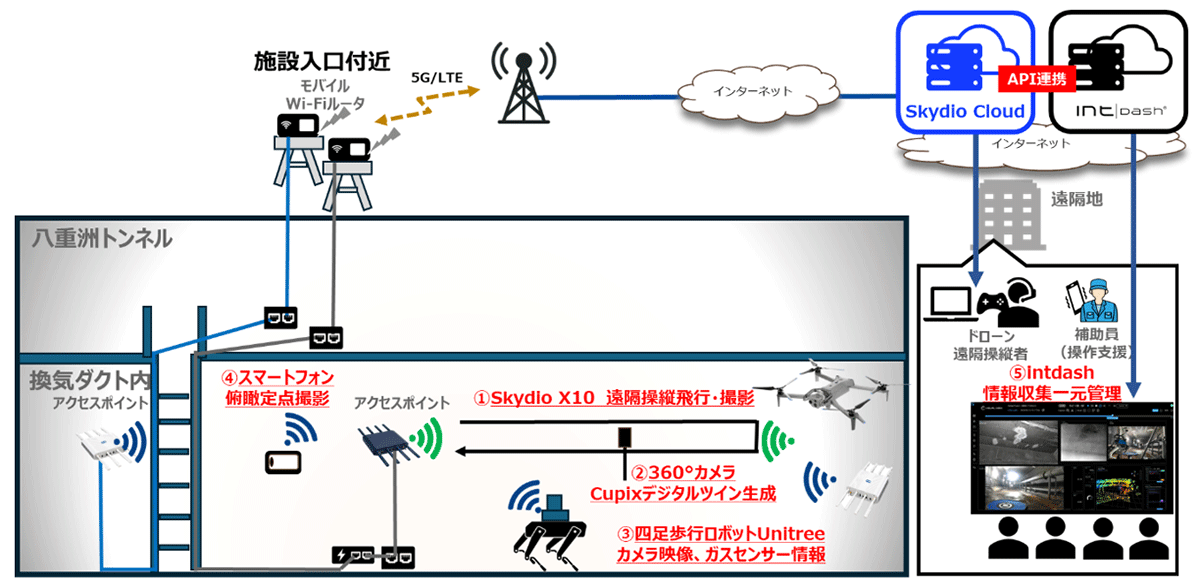
<図1 実証構成イメージ>
① ドローン「Skydio X10」による電波不感地帯での遠隔操縦・映像配信。
② 360°カメラで撮影した映像を「CupixWorks※2」でデジタルツイン生成。
③ 四足歩行ロボット「Unitree Go2※3」のカメラ映像、搭載したガスセンサー情報配信。
④ スマートフォン搭載カメラによる俯瞰撮影映像配信。
⑤ 各種デバイス(①、③、④)配信情報を「intdash※4」(IoTプラットフォーム)で一元管理。
※1 ドローン操縦は、NTTドコモビジネス本社の会議室で実施しました。
※2 CupixWorksとは、CUPIX Incが提供する建設業界向けデジタルツイン生成ツールです。
※3 Unitree Go2とは、Unitree Robotics Incが提供する小型四足歩行ロボットです。
※4 intdashとは、株式会社アプトポッドが提供する複数デバイスのデータを収集し一元管理するためのIoTプラットフォームです。
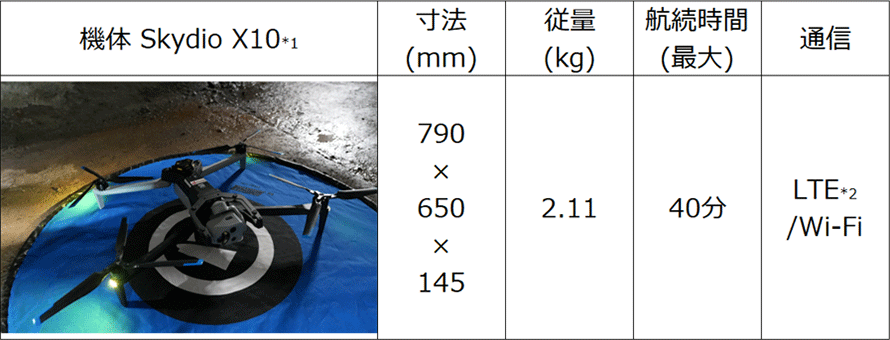
■使用機体
電波不感地帯における遠隔操縦および映像配信に用いたドローン「Skydio X10」の概要は以下の通りです。
※1 Skydio X10とは、最先端AIと高性能センサーを搭載した小型ドローンです。ドローンポートを用いない環境で上空LTEを活用せずにトンネルダクト内の遠隔操縦を実施するのは国内初となります。
※2 Skydio X10は、LTE通信に対応しており、NTTドコモとNTTドコモビジネスが連携して提供している「LTE上空利用プラン」並びに、混雑エリアや時間帯においても安定した通信を実現するLTE上空利用プラン専用の法人向けオプションサービス「ワイドオプション」に対応しています。
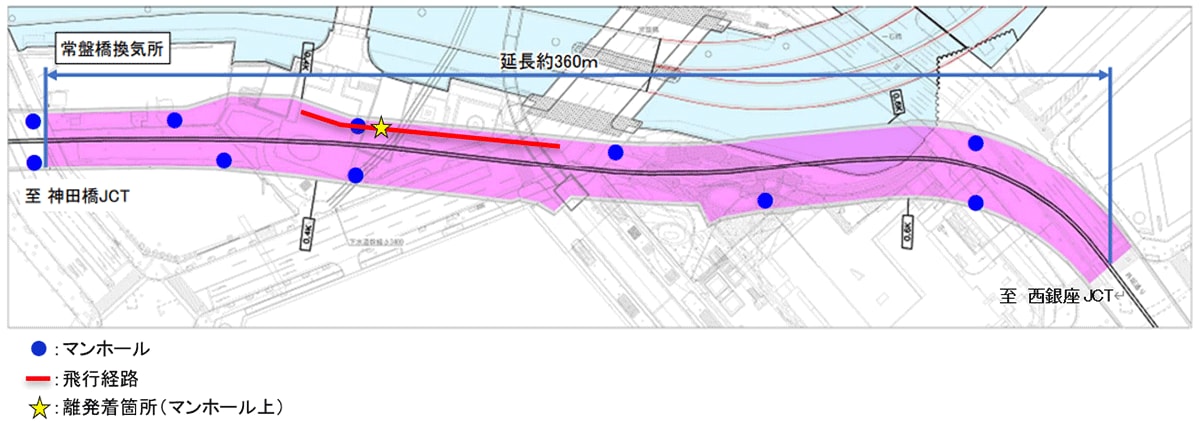
■飛行経路
トンネル換気ダクト内における「Skydio X10」の飛行経路は以下の通りです。(飛行距離約70m)
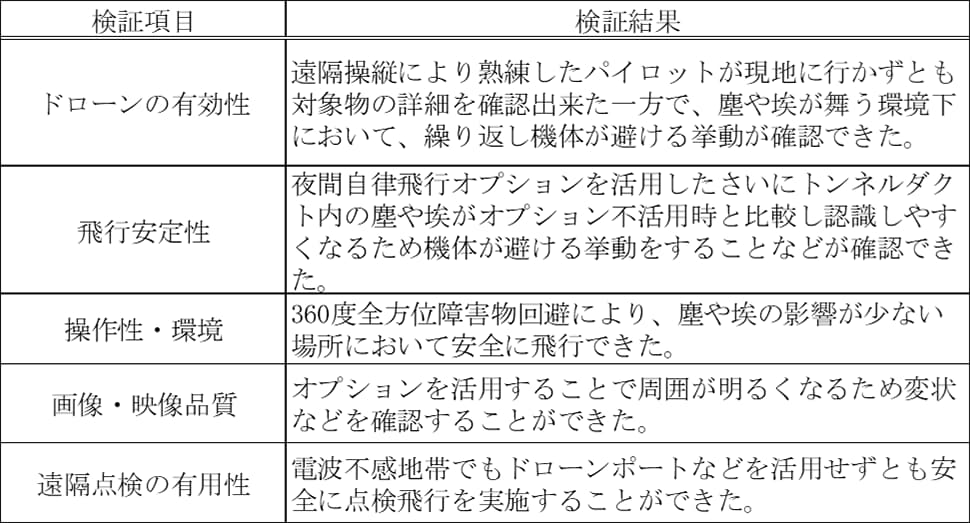
■検証項目と結果
本実証では、電波不感地帯におけるドローン点検について、有効性、飛行安定性、操作性、映像品質および遠隔点検の有用性の観点から検証を行いました。
具体的な検証結果は以下の通りです。
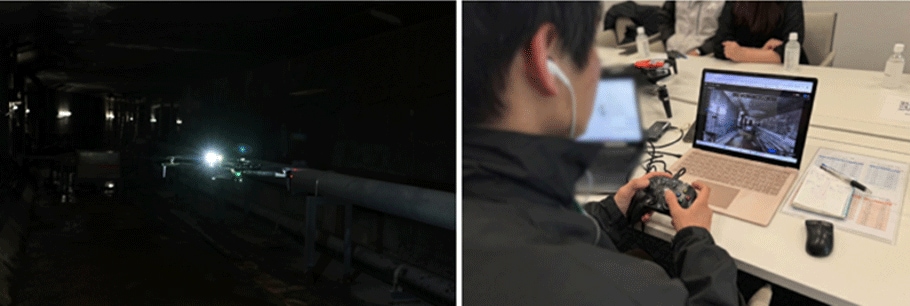
■実証実験の様子
- 換気ダクト内ドローン飛行とNTTドコモビジネス本社オフィスからダクト内の遠隔操縦
- intdash(IoTプラットフォーム)によるデータの一元管理

 このページのPDFを開く
このページのPDFを開く